Kalman Filtresi
Kalman Filtresi, durum uzayı modeli ile gösterilen bir dinamik sistemde, modelin önceki bilgileriyle birlikte giriş ve çıkış bilgilerinden sistemin durumlarını tahmin edilebilen filtredir. Macar asıllı Amerikan matematiksel sistem teoristi Rudolf Kalman tarafından bulunmuştur.
Gözlemleme teorisi; karar verilen bir bakış açısı temelinde, sistemin durum tahmini için izlenecek bir yoldur. Eğer sistemin stokastik veya rastgele gürültülü yönü hesaba katılırsa minimum varyans tahmini veya Kalman Filtresi çok uygun olmaktadır. Kalman Filtresi, geleneksel tahmin edicilerde olduğu gibi filtreleme özelliğine rağmen, sistemin ölçülemeyen durumlarını tahmin etmek için de çok güçlü ve yeteneklidir.
Kalman Filtresi, 1960'lardan sonra araç navigasyonu başta olmak üzere (havacılık uygulamaları tipik olmasına rağmen, başka uygulama alanlarında da) kullanılan ve sistemin durumu hakkında optimize edilmiş bir tahmin sağlayan bir algoritmadır. Algoritma, gürültülü bir gözlem veri akışı (tipik olarak, sensör ölçümleri) üzerinde gerçek-zamanlı, özyinelemeli çalışarak hatayı en aza indirecek şekilde filtreleme yapar ve sistemin fiziksel karakteristiklerinin modellenmesi ile üretilen gelecek durumun matematiksel tahminine göre optimize eder.
Model tahmini, gözlem ile karşılaştırılır ve bu fark, Kalman kazancı olarak bilinen bir çarpan ile ölçeklendirilir. Bu daha sonra sıradaki tahminleri iyileştirmek için modele bir girdi olarak geri beslenir. Kazanç performansı iyileştirmek için ayarlanabilir. Yüksek kazanç değerleri kullanılırsa, filtre çıkışı gözlemleri daha yakından takip eder. Düşük kazanç değeri kullanıldığında filtre model tahminlerini daha yakından takip eder. Yöntem, gerçek bilinmeyen değerlere, tek bir ölçüme veya sadece model tahminlerine dayanarak elde edilebilecek tahminlerden daha yakın tahminler üretmek için kullanılmaktadır.
Her bir zaman adımında, Kalman Filtresi, gerçek bilinmeyen değerlerin tahminlerini belirsizlikleriyle (uncertainty)) beraber üretir. Sıradaki ölçümün sonucu gözlendiğinde, bu tahminler, belirsizliği düşük tahminlere daha fazla ağırlık vererek, ağırlıklı ortalama ile güncellenir.
Teorik bir bakış açısından, Kalman Filtresi'nin ana varsayımı alttaki sistemin doğrusal dinamik bir sistem olduğu ve tüm hataların ve ölçümlerin Gaussian dağılımına (sıklıkla çok değişkenli Gaussian dağılımı) sahip olduğudur. Yönteme eklentiler ve genelleştirmeler de geliştirilmiştir. Alttaki model Hidden-Markov-Modeli'ne benzeyen bir Bayesian modelidir ancak gizli-değişkenlerin durum uzayı devamlıdır ve tüm gizli ve gözlenen değişkenler'in dağılımı Gaussian'dır.
Örnek uygulama
Kalman filtresi sensör füzyonu ve veri füzyonu için kullanılır. Tipik olarak, gerçek zamanlı sistemler bir sistemin durumunu elde etmek için tek bir ölçüm yapmak yerine birçok ardışık ölçüm üretir. Bu birçok ölçüm daha sonra o zaman anında sistemin durumunu üretmek için matematiksel olarak birleştirilir.
Örnek bir uygulama olarak, bir kamyonun yerini hassas olarak belirleme problemini düşünün. Kamyona pozisyon tahminini birkaç metre ile sağlayabilen bir GPS birimi takılabilir. GPS tahminleri gürültülüdür; okumalar, her zaman gerçek pozisyonun birkaç metre yakınında olmasına rağmen, hızlıca etrafta zıplayabilir. Kamyonun pozisyonu, direksiyon dönüşleri ve direksiyonun açısını izleyerek, hızı ve yönü zamana göre entegre ederek de tahmin edilebilir. Bu teknik parakete hesabı olarak bilinir. Tipik olarak, parakete hesabı kamyonun yeri hakkında çok yumuşak bir tahmin sağlayacaktır, ancak küçük hatalar biriktikçe sapacaktır. Ayrıca, kamyonun fizik kurallarını takip etmesi de beklenir, yani pozisyonunun hızıyla orantılı olarak değişmesi beklenir.
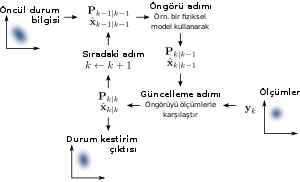
Bu örnekte, Kalman filtresinin iki ayrı fazda çalıştığı düşünülebilir: tahmin et ve güncelle. Tahmin etme fazında, kamyonun eski yeri Newton'ın hareket yasaları göre değiştirilecek, (dinamik veya "durum değiştirme" modeli) ayrıca gaz pedalı ve direksiyon tarafından üretilen tüm değişiklikler katılacak. Sadece bir pozisyon tahmini hesaplanmayacak, ancak yeni bir kovaryans da hesaplanacaktır. Belki de kovaryans kamyonun hızı ile orantılıdır; çünkü yüksek hızlarda parakete hesabının hassaslığından daha az eminiz ancak çok yavaş hareket ettiğinde bayağı eminiz. Sonra, güncelleme fazında, kamyonun pozisyonunun bir ölçümü GPS biriminden alınır. Bu ölçümle beraber bir miktar belirsizlik de gelir ve bunun koyaryansının önceki fazdan gelen tahminin kovaryansına oranı, yeni ölçümün güncellenen tahmini ne kadar etkileyeceğini belirler. İdeal olarak, parakete hesabı tahminleri gerçek pozisyondan uzaklaştıkça, GPS ölçümleri pozisyon tahminlerini gerçek pozisyona doğru, hızlıca değişim ve gürültülü olmayacak şekilde çeker.
Notlar
Dış bağlantılar
- Zaman Serileri ve Finans, B. Bayramli, 2015