Katı cisim dinamiği
Katı-cisim dinamiği, dış kaynaklı kuvvetler karşısında hareket eden birbiri ile ilişkili sistemlerin analizini inceler. Her bir gövde için, cisimlerin katı olduğu ve bu nedenle uygulanan kuvvetler nedeni ile deforme olmadıkları, sistemi tanımlayan taşıma ve dönme parametrelerinin sayısını azaltarak analizi basitleştirmektedir.
Katı cisim dinamiği Newton’un hareket yasalarından ve Lagrange mekaniğinden oluşan hareket denklemleri ile tanımlanmaktadır. Bu denklemlerin çözümleri, katı cisimlerin içinde olduğu sistemin değişimlerini zaman bağlı yapılandırmaktadır. Katı cisim dinamiğinin formülize edilmesi ve çözülmesi mekanik sistemlerin bilgisayar benzetimlerinin önemli bir aracıdır.
Düzlemsel katı cisim dinamiği
Eğer katı parçacıkların oluşturduğu bir sistemde her bir parçacığın izlediği yol sabit bir düzleme paralel olarak hareket ediyor ise, sistem düzlemsel hareket ile sınırlanmıştır. Bu durumda N parçacıktan oluşan Pi, i=1,…N katı cisim sistemi için Newton Kanunları basitleşir, çünkü k-yönünde hareket yoktur. Referans noktası olan R’de Sonuç kuvvet ve tork aşağıdaki denklemlerle elde edilir:

Burada ri her bir parçacık için düzlemsel hareket yönünü gösteren vektördür. Katı cisim kinematik formülü Pi parçacığının referans bir parçacığa göre R konumunu ve A ivmelenmesini içeren denklemini ve açısal hız vektörü ile ivmelenme vektörü ‘yıda içeren yapıyı kapsar;

Düzlem üzerinde sınırlanmış bu hareket sistemleri içinaçısal hız ve açısal ivme vektörleri k boyunca ve hareket düzlemine dik olarak yönlendirmişlerdir; bu ivme denklemini de sabitleştirir. Bu durumda ivme vektörleri, referans noktası olan R’den ri noktasına birim vektörleri kullanarak ifade edilebilir ve birim vektörlerti=kxei olur.

Bu, sistemin sonuç vektörünün;

ve torkun

olmasını sağlar.
Burada eixei=0, ve eixti=k bütün Pi parçacıkları için düzleme dik birim vektörlerdir. Kütle merkezi C referans nokta olarak kullanılırsa bu denklemler için Newton kanunları aşağıdaki gibi sadeleşir:

Burada M toplam kütleyi, Ic katı cisim sisteminin kütle merkezinden geçen ve harekete dik eksen etrafındaki atalet momentini gösterir.
Üç Boyutlu Uzayda Katı Cisim
Konumlama ve Yaklaşım Tanımları
Esas Yazı: Dönmenin Üç Boyutlu Yapılandırılması
Üç boyutlu uzayda katı cismin konumlandırılması için çeşitli metotlar geliştirilmiştir. Bu metotların bir özeti bu bölümde verilmektedir.
Euler Açıları
Esas Makale: Euler açıları
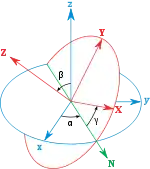
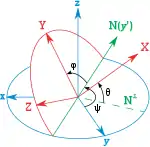
Konumlandırmanın ilk girişimlerini Leonhard Euler gerçekleştirmştir. Euler birbiri etrafında dönebilen üç çerçeve düşünmüş ve sabit bir çerçeveden başlayarak, üç adet dönüş ile herhangi bir referans çerçeve oluşturabileceğini keşfetmiştir. Bu üç dönüş değerine Euler açısı denilmektedir.
Tait-Bryan Açıları
Esas Makale:
Bu üç açı savrulma, dönme ve atılma ayrıca navigasyon veya Kardan açıları olarak da adlandırlmaktadır. Matematiksel olarak on iki setten oluşan Euler açılarının içinden altı olasılığı içeren bu konumlandırma bir cismin konumunu (örneğin bir uçağın konumu) belirlemekte en iyi yaklaşımdır. Havacılıkta genellikle Euler açıları olarak kullanılırlar.
Oryantasyon Vektörü
Esas Makale: Eksen Açısı ile tanımlama
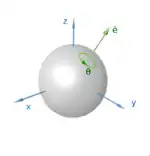
Euler ayrıca iki farklı eksen etrafında dönmenin, farklı bir eksen etrafında tek bir dönme olarak da ifade edilebileceğini fark etmişti (Euler’in dönme Teorisi). Bu durumda daha önce kullanılan üç açı tek bir dönmeyi ifade etmeli idi, bu eksenin hesaplanması matris yöntemi geliştirilene kadar karmaşıktı. Bu bilgiler ışığında herhangi bir dönme işlemini ifade etmek için, dönme ekseni üzerinde bir vektör ve açı büyüklüğüne eşit bir modülü olan vektörel bir yaklaşım geliştirdi. Bu durumda herhangi bir dönme, bir referans noktadan tanımlana bilen bir dönme vektörü ile ifade edilebildi (bu vektör Euler vektörü olarak da adlandırılır). Bu vektör konumlama için kullanıldığında konumlama vektörü veya irtifa vektörü olarak adlandırılır. Eksen-açısı temsili olarak bilinen benzer bir metot, dönmeyi veya konumlandırmayı dönme ekseni üzerine yerleştirilmiş bir birim vektör ve açıyı ayrıca gösteren bir yaklaşımla ifade etmektedir (Bakınız şekil).
Konumlama Matrisi
Esas Makale: Dönme Matrisi
Matrisleri geliştirilmesi ile Euler teorisi yeniden yazılmıştır. Dönme hareketi, dönme matrisleri veya yönlü kosinüs matrisleri olarak adlandırılan, dikey matrisler kullanılarak tanımlanmıştır. Konum belirlemede kullanılan matrisler, genellikle konumlama matrisi veya irtifa matrisi olarak isimlendirilir.
Yukarıda belirtilen Euler vektörü, dönme matrisinin öz vektörüdür. İki dönme matrisinin sonucu, dönmelerin bir bileşkesidir. Bu durumda konum, başlangıçtan itibaren oluşan dönme hareketlerinin bütünü olarak tanımlanabilir.
Simetrik olamayan cismin n-boyutlu bir uzayda yerleştirilmesi SO(n) × Rn, olarak tanımlanır. Cisim için konumlandırma cisim üzerine yerleştirilecek teğet vektörleri ile görselleştirilebilir. Her bir vertörün gösterdiği nokta cismin konumunu ortaya koyar.
Kuaternion Konumlaması
Esas Makale: Kuaternionlar ve uzaysal Dönüş
Dönmeyi tanımlamanın bir başka yolu, versor olarak da tanımlanan dönme kuaternionlarının kullanılmasıdır. Kuaternionlar, dönme matrisine ve vektörüne eşleniktir ve dönme vektörlerine kıyasla matrislere veya matrislerden daha kolay dönüşümü sağlanır. Konumlama için kullanıldıklarında konumlama kuaternionu veya irtifa kuarternionu olarak tanımlanır.
Newton’un 2. kanununun üç boyutlu uzayda tanımlanması
Katı cisim dinamiğini üç boyutlu uzaya uyguladığınızı düşünün, Newton’un ikinci kanunun cismin hareketini ve kuvvetlerin ve torkların oluşturduğu sistemi kapsayacak bir yapıya genişletilmelidir. Newton 2. Kanununu bir parçacık için söyle açıklamıştır: “Bir cismin hareketindeki değişim, uygulanan kuvvetinbüyüklüğü ve kuvvetin uygulandığı doğrusal yön ile doğru orantılıdır.” Newton “hareketi” kütle çarpı hız olarak tanımlamaktadır, bu durumda “hareketteki değişim” de kütle çarpı ivme olarak ortaya çıkmaktadır; bu nedenle kanun söyle yazılır:

Burada, F parçacık üzerinde etki eden tek dış kuvvet olarak anlaşılmaktadır. M parçacığın kütlesi, a ivme vektörüdür. Newton 2. Kanununun katı cisimlere genişletilmesi, katı cismin katı parçacıklardan oluşan bir sistem olarak tanımlanması ile elde edilmektedir.
Parçacıkların katı sistemi
N parçacıktan oluşan Pi i=1, … N, bir sistemde bütün parçacıklar katı bir cisim oluşturuyor ise, Newton’un 2. Kanunu, cismi oluşturan bu parçacıkların her birine uygulanır. Eğer Fi, mi kütleli, her bir parçacığa (Pi) uygulanan dış kuvvet ise

Burada, Fij Pj parçacığının diğer parçacıklar ile basit mesafede duran Pi parçacığı üzerinde etki eden iç kuvvettir.
Katı sistem üzerinde etki eden kuvvet denklemlerinde önemli bir sadeleştirme, sonuç kuvvet ve tork kullanımı ile elde edilmektedir. Sonuç kuvvet ve sonuç tork için kullanılan denklemler aşağıda verilmektedir.

Burada, Ri, Pi parçacığının konumunu tanımlayan vektörü göstermektedir. Tek bir parçacık için yazılmış olan Newton’un 2. Kanunu birleştirilerek sonuç kuvveti ve sonuç torku oluşturur,

Burada, iç kuvvetler Fij birbirini elimine eder. Katı cisim kinematiği aşağıda verilen formülü, Pi parçacığının referans parçacığınagöre vektörel R pozisyonu ve ivmelenmesi a, ayrıca açısal hız vektörü ve açısal ivmelenme vektörü olarak tanımlar:

Kütle Özellikleri
Katı cismin kütle özellikleri kütle merkezi ve atalet matrisi ile ifade edilir. Aşağıdaki şartları yerine getiren bir referans noktasının R seçilmesi gereklidir:

bu durumda ortaya çıkan sistemin kütle merkezidir. Sitemin R referans noktasına göre atalet matrisi [IR] aşağıdaki gibi tanımlanmış olur:

burada Ri–R konum vektöründen oluşturulan eksi-bakışımlı matrisi [Ri–R] (ters simetrik matris olarak da bilinmektedir), tanımlamaktadır.
Kuvvet-Tork Denklemleri
Kütle ve atalet matrislerini kullanarak oluşturulan kuvvet ve tork denklemleri aşağıdaki formu alırlar:

ve katı cisim için Newton’un 2. Kanunu olarak bilinirler.
Birbiri ile ilişkili katı cisimler dinamiği Bj, j=1, … M, her bir katı cismi izole ederek ve etkileşim kuvvetlerini ortaya koyarak denklemleştirilir. İç ve dış sonuç kuvvetleri, kuvvet-Tork denklemlerini ortaya koyar:

Newton’un yaklaşımı, M tane katı cisim için 6M denklemi ortaya çıkarır.[4]
Katı cisim üzerinde etkili edinimsiz kuvvetlerin oluşturduğu iş
Bir dizi kolaylaştırıcı özelliği içeren alternatif bir yaklaşım, kuvvetlerin katı cisim üzerinde oluşturduğu edinimsiz iş kavramı kullanılarak oluşturulabilir. Kuvvetlerin tek bir katı cismin üzerindeki çeşitli noktalara etkisi nedeni ile oluşan edinimsiz işi, uygulama noktalarındaki hızlar ve sonuç kuvvet ve sonuç tork olarak hesaplanabilir. Bunu gözlemlemek için F1, F2 ... Fn ‘nin R1, R2 ... Rn noktalarında etkili olan kuvvetler olduğu varsayalım. Ri i=1, … n, gidim izleri, katı cismin hareketini tanımlar. Ri’nin gidim izi üzerindeki hızları aşağıdaki formül ile verilir:

Burada cismin açısal hız vektörüdür.
Edinimsiz İş
Edinimsiz iş her bir kuvvetin, uygulandığı noktan, kendi edinimsiz yer değiştirmesi ile iç çarpımı olarak hesaplanır.

Eğer katı cismin gidim izi, genelleştirilmiş koordinatların bir seti (qj, j = 1, ..., m,) olarak tanımlanır ise, bu durumda edinimsiz yer değişimler, δri , aşağıdaki denklem ile ifade edilir:

Bu sistemin kuvvetlerinin cisim üzerinde etkili olan kuvvetlerinin edinimsiz işi, genel koordinatlar olarak ifade edildiğinde:

Veya δqj katsayıları parantezinde toplandığında

Olarak yazılır.
Genelleştirilmiş Kuvvetler Katı bir cismin gidim izini kolaylık olması açısından genelleştirilmiş tek bir koordinat q(mesela dönme açısı olabilir) olarak ifade edelim, bu durumda denklem;

Denklem, sonuç kuvveti ve sonuç torku cinsinden yazılır ise aşağıdaki formu alır;

Q parametresinin aşağıdaki tanımı kapsadığı;

bu denklem edinimsiz yer değiştirme ile ilişkili genelleştirilmiş kuvvet olarak bilinmektedir.

Burada
Bu nokta yerçekimi veya yay kuvvetleri gibi korunmalı kuvvetlerin, potansiyel enerji olarak bilinen potansiyel fonksiyondan V(q1, ..., qn), elde edilebileceğini belirtmek yerinde olur.

Edinimsiz iş prensibinin D'Alembert formunda ifade edilmesi
Katı cisimlerin oluşturduğu mekanik sistemlerin hareket denklemleri edinimsiz işi D'Alembert formunda ifade ederek belirlenebilir. Edinimsiz iş, katı cisimlerin durağan denge içinde olduğu sistemleri incelemek için kullanılmaktadır, ancak bu yaklaşım ivmelenme terimlerinin Newton kanunlarına eklenmesi ile genellenmiş dinamik denge yaklaşımlarında kullanılmaya başlanmıştır.
Statik Denge
Katı cisimlerden oluşan mekanik bir sistemde statik denge, herhangi bir yer değiştirme için uygulanan kuvvetlerin edinimsiz iş toplamının sıfır olması demektir. Bu durum edinimsiz iş prensibi olarak bilinir. Bu durum herhangi bir edinimsiz yer değiştirmeleri ifade eden genelleştirilmiş kuvvetlerin sıfır olması gerekliliğine, Qi=0, eşleniktir. Mekanik bir sistemin n tane katı cisimden Bi, i=1, … n, oluştuğunu ve her bir cisim üzerinde sonuç kuvvetinin uygulanan Kuvvet-Tork çiftinin Fi ve Ti i= 1, … n, bir sonucu olduğunu kabul edin. Bu kuvvetlerin, cisimleri bir arada tutan etkileşim kuvvetlerini kapsamadığının kabul edildiğini belirtmek gerekir. Son olarak,hızınVi ve açısal hızın ωi, i=,1...,n, her bir cisim içintek bir genel koordinat q ile tanımlandığını varsayın. Katı cisimlerden oluşan böyle bir sistemin tek serbestlik derecesi vardır. Tek serbestlik derecesi olan bir sisteme uygulanan kuvvetlerin edinimiz iş ve troku, Fi ve Ti aşağıdaki denklemle verilir;

Burada

Tek serbestlik derecesi olan sistem üzerinde etkili genel kuvvet denklemi. Mekanik sistemin m genel koordinat qj, j=1,...,m, ile tanımlanması durumunda bu sistemin m adet serbestlik derecesi vardır.

Burada

denklemi genelleştirilmiş koordinat qi ile ilişkilendirilmiş genel kuvvetleri ifade etmektedir.

Bu m denklemleri katı cisimlerin statik denge sistemlerini tanımlar.
Genelleştirilmiş Atalet Kuvvetleri
Genel koordinat q ile tanımlı, sonuç kuvvet ve sonuç tork vektörlerini etkisi altında hareket eden, bir serbestlik derecesi olan tek bir katı cisim ele alınsa; sonuç kuvvet vetork vektörlerinin referans noktasının cismin kütle merkezinde olduğu kabul edildiğinde, genel atalet kuvveti Q*, genel koordinat sistemi ile ilişkili olarak, aşağıdaki biçimde verilebilir;

Bu atalet kuvveti katı cismin kinetik enerjisi kullanılarak hesaplanabilir.

aşağıdaki formülü kullanarak;

M genel koordinatları olan n adet katı cisimden oluşan sistemin kinetik enerjisi aşağıdaki denklem ile verilir

ve m adet genelleştirilmişatalet kuvvetlerinin hesaplanmasında kullanılır.[6]

Dinamik Denge
D'Alembert formunda ifade edilen eylemsizlik prensipleri, herhangi bir yer değiştirmeye bağlı olarak, uygulanan toplam kuvvetlerin ve atalet kuvvetlerinin toplamının sıfır olması durumunda katı cisim sisteminin dinamik dengede olduğunu ifade eder. Bu durum, m genelleştirilmiş koordinatları olan n katı cisimden oluşan sistemin dinamik dengesi, herhangi bir eylemsiz yer değiştirme δqj için şöyle ifade edilir;

Bu durum m adet denklem geliştirilmesine olanak sağlar,

Bu denklem ayrıca aşağıdaki formda da ifade edilebilir;

Bunu sonucu, m adet hareket denklemden oluşan ve katı cisim sisteminin dinamiğini tanımlayan bir yapıdır.
Lagrange Denklemleri
Eğer genelleştirilmiş kuvvetler Qi, potansiyel enerji denklemlerinden V(q1,...,qm) geliştirilebilirse, bu durumda geliştirilen hareket denklemleri aşağıdaki formda ifade edilir;

Bu durum için Lagrange işlevi yaklaşımın kullanılması durumunda, L=T-V, denklemler,

Bu denklemler Lagrange hareket denklemleri olarak bilinir.
Lineer ve Açısal Momentum
Parçacık sistemleri
Katı cisim sisteminin parçacıklarının doğrusal ve açısal momentumu, parçacıkların konum ve hızını kütle merkezine göre ölçülerek denklemleştirilir. Pi i=1 … n, parçacıklardan oluşan bir sistemin ri koordinatlarında ve vi hızının olduğunu Kabul edelim. R referans noktası belirlendikten sonra görece konum ve hız vektörleri belirlenir;

Referans noktası R’ye göre Toplam doğrusal ve açısal momentum vektörleri

Ve

Eğer R kütle merkezi olarak seçilirse, denklemler aşağıdaki şekilde basitleştirilir;

Parçacıkların katı cisim sistemi Bu formülleri katı cinsime özgü hale getirmek için, parçacıkların Pi i=1 …n, birbirlerine katı olarak ri koordinatlarında bağlandığı ve hızlarının violduğu varsayıldığında; R referans noktası kullanılarak görece konum ve hız vektörleri hesaplanır.

Burada sistemin açısal hızıdır. [7][8][9]
Katı cisim sisteminin kütle merkezi R referans alınarak ölçülen doğrusal momentum ve açısal momentum;

Bu denklemler aşağıdaki şekilde basitleşir,

Burada M sistemin toplam kütlesini ve [IR]’de atalet moment matrisini gösterir, atalet momenti aşağıdaki denklem ile verilmiştir.

Burada [ri-R] eksi-bakışımlı (veya ters simetrik) matrisi, ri-R vektöründen oluşturulmuş,
Uygulamaları
•Robotik Sistemlerin Analizi
•İnsanlar, Hayvanlar ve humonoidlerin biyomekanik analizleri
•Uzaydaki cisimlerin analizleri
•Dinemaik tabanlı duyaçların tasarımı ve geliştirilmesi, jiroskokip duyaçlar vb.
•Otomobillerde çeşitli denge arttırıcı tasarım ve uygulamaların geliştirilmesi
•Bilgisayar oyunlarında katı cisim içeren grafik uygulamalarının geliştirilmesi
Ayrıca İnceleyin
•Analitik Mekanik
•Analitik Dinamik
•Varyasyon Kalkülüsü
•Klasik Mekanik
•Dinamik (Fizik)
•Klasik Mekanik Tarihi
•Langrange İşlevi Mekanik
•Lagrange İşlevi
•Hamilton Mekaniği
•Katı cisim
•Katı Rotor
•Yumuşak cisim Dinamiği
•Çoklu cisim Dinamiği
•Polhode
•Herpolhode
•Devinim
•Poinsot’unİnşaası
•Jiroskop
•Makina Fiziği
•Fiziksel İşlem Birimi
•Fizik Soyutlama Katmanı – Birleştirilmiş çoklu gövde benzetim cihazı
•Dynamechs – Katı cisim benzetim cihazı
•RigidChips – Japon katı cisim benzetim cihazı