Hareket denklemleri
Matematiksel fizikte, hareket denklemi, fiziksel sistemin davranışını, sistem hareketinin zamanı ve fonksiyonu olarak tanımlar.[1] Daha detaya girmek gerekirse; hareket denklemi, matematiksel fonksiyonların kümesini "devinimsel değişkenler" cinsinden izah eder. Normal olarak konumlar, koordinat ve zaman kullanılır, ama diğer değişkenlerde kullanılabilinir, momentum bileşenleri ve zaman gibi. En genel seçim genelleştirilmiş koordinatlardır ve bu koordinatlar fiziksel sistemin karakteristiğinin herhangi bir uygun değişkeni olabilirler.[2] Klasik mekanikte, fonksiyonlar öklid uzayında tanımlanmıştır ama görelelikte öklid uzayı, eğilmiş uzay ile tanımlanmıştır. Eğer sistemin dinamiği biliniyor ise, denklemler dinamiğin hareketini izah eden differansiyel denklemlerin çözümleri olacaktır.
İki tane açıklaması vardır hareketin: dinamik ve kinematik. Dinamik geneldir, parçacığın momentası, kuvvetleri ve enerjisi hesaba katıldığında. Bu durumda, bazen terim sistemi tatmin eden bir differansiyal denkleme işaret edebilir (örneğin, newton'un ikinci yasası veya Euler-Lagrange denklemleri), ve bazen de denklemlerin çözümlerine.
Kinematik, konumsal ve zaman bağlantılı değişkenlerle ilgilendiği için daha basittir. Sabit ivme durumunda, hareketin bu göreceli basit denklemleri genellikle "YİSİZ" denklemleriyle çözülebilir," kinematik büyüklüklerden doğarlar, yer değiştirme (Y), ilk hız(İ), son hız (S), ivme (İ), ve zaman(Z). (aşağıya bakınız).
Bu sebeplerden dolayı, hareket denklemleri hareketin bu ana sınırlandırıcılarıyla gruplandırılabilir. Tüm durumlarda, hareketin ana türü ya çeviri ya rotasyon ya salınım ya da herhangi bir kombinasyonudur.
Tarihsel olarak, hareketin denklemleri klasik mekanikte başlamıştır ve göksel mekanikle büyümüştür, çok büyük objelerin hareketini tarif ederken. Sonradan, hareket denklemleri, elektrodinamikte gözüktü, elektrik ve manyetik alan içindeki yüklenmiş parçacıkların hareketini tarif ederken. Genel göreceliğin gelişiyle, klasik hareket denklemleri değiştirildi. Tüm bu durumlarda, kuvvetler ve enerji değişimlerinden etkilenmiş olan parçacığın, yörüngesini uzay ve zaman koordinatları cinsinden içeren bir differansiyel denklem şeklinde ifade edildi.[3] Kuantum mekaniğinin denklemi dahi hareket denklemi olarak düşünülebilir, çünkü o denklemler dalga fonksiyonlarının kuantum durumunun nasıl davranacağını benzer olarak, parçacığın uzay ve zaman koordinatlarını kullanarak açıklayan differansiyel denklemleriydi. Hareket denklemlerinin benzeşleri vardır, fiziğin diğer dallarında da, göze çarpmak gerekirse dalgalar. Bu denklemler aşağıda açıklandı.
Giriş
Nitel
Hareket denkleminin genel anlamda kapsadıkları:
- genellikle herhangi bir fiziksel yasa ve uygulanan tanımları fiziksel nicelikleri olarak tanımlanan bir hareketin diferansiyel denklemi problem için bir denklem kurmak üzere kullanılır,
- sınır ve başlangıç değerlerini belirlemek,
- pozisyonun veya momentumun fonksiyonu ve zaman değişkenleri, sistemin kinematiğini tarif ederken,
- sınır ve başlangıç değerlerini kullanarak sonuçta oluşan diferansiyel denklemi çözerken.
Differansiyel denklem, uygulamanın genel tanımıdır ve belirli bir durum için ayarlanabilir, çözüm tam olarak sistemin nasıl hareket edebileceğin başlangıç anından sonraki herhangi bir an için, sınır değerlerini kullanarak tanımlar.[1][4]
Nicel
Newton mekaniğinde, hareket denklemi M genel formu olan ikinci dereceden olan adi diferansiyel denklemler halini alır, obje r konumundayken (detaylar için aşağıya bakınız)

t zaman ve fonksiyonların üstlerindeki noktaların anlamı; zamana göre türevleri o fonksiyonları.
Başlangıç koşulları t = 0 anı için verildi;

Bir başka dinamik değişken ise parçacığın momentumudur. r yerine kullanılabilir olan (ama daha az yaygın bu kullanım), açıklamak gerekirse, momentumdaki ikinci dereceden adi diferansiyel denklem:

Çözüm r (veya p), bu hareket denklemi için, başlangıç değerleri dikkate alınarak yapılan, sistemin t=0 anından sonraki tüm zamanları içindir. Birden çok parçacık için, ayrı denklemler vardır her bir parçacık için (İstatistiksel mekanikte, bu birçok parçacığın istatistiksel topluluğu ile çelişir, ve çok parçacıklı sistemlerle, quantum mekaniğindeki - tüm parçacıkların tek bir olasılık dağlımı ile tanımlandığı). Bazen, denklem lineer olur ve kesin olarak çözülebilir. Genelde, denklem lineer değildir ve kaotik bir davraşın halinde olur, sistemin ne kadar duyarlı bir başlangıç koşuluna sahip olmasıyla kaotiklik değişir.
Genelleştirilmiş Lagrange mekaniğinde, genelleştirilmiş koordinatlar q ( veya genelleştirilmiş momenta p) genel konum (veya momentum) ile yer değiştirir. Hamiltonian mekaniğinde bu durum oldukça farklıdır, iki birinci dereceden denklem vardır, genelleştirilmiş koordinalar ve momentada:

q genelleştirilmiş koordinatların değişkenler grubu ve benzer olarak p genelleştirilmiş momentumun değişkenler grubudur. Başlangıç koşulları da aynı şekilde tanımlanmıştır.
Bir parçacık için kinematik denklem
Kinematik nicelikler
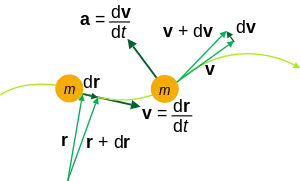
Anlık pozisyondan r = r (t), anlık belirli bir an için zamanın değeri, anlık hız v = v (t) ve ivme a = a (t), koordinattan bağımsız genel tanımları vardır;[5]

Hız vektörünün her zaman hareketin yönüne doğru olduğuna dikkat etmek gerekir. Bir diğer deyişle, eğimli yörüngeye teğet vektörüdür. Detaya girmeden konuşursak, birinci derecen türevler eğimlerin teğetleriyle bağlantılıdır. Yine eğimli yörüngeler için, ivme vektörü yörüngenin eğrilik merkezine doğrudur. Tekrar, detaya girmeden konuşursak, ikinci dereceden türevleri eğrilikle ilgilidir.
Bu niceliklerin dönüş hareketindeki karşılıkları açısal konum θ = θ(t) (bir eksene göre dönen parçacığın açısı), açısal hız ω = ω(t) ve açısal ivme a = a(t) olarak ifade edilir:

ve

burada dönme ekseniyle aynı doğrultudaki birim vektördür. 'nin yönündeki birim vektördür ve açıya teğetsel bir birim vektördür. Bu dönüşsel tanımlarda, açı belirlenmiş bir eksene göre herhangi bir açı olabilir. Açısal hız geleneksel olarak ile gösterilir, ama bu sembol polar koordinat sistemlerinde kullanılan ile karıştırılmamalıdır.





ω açısal hızıyla, herhangi bir eksen etrafında yörüngelenen, noktasal parçacıklar için geçerlidir, birazdan yazılacak olan denklemler:[6]


r açısal konum, v parçacığın teğetsel hızı ve a parçacığın ivmesidir. Daha genel olursak, bu denklemler, dönüşün herhangi sürecinde, bir katı cismin herhangi bir noktası için de doğrudurlar.
Sabit lineer ivme: doğrudaş vektörler
"
Bu denklemler, lineer olarak ilerleyen parçacıklara uygulanır, üç boyutlu düzlemde düz çizgi üstünde sabit ivme ile ilerleyen parçacıklar için. Çünkü konum, hız ve ivme doğrudaş olduğundan (paralel ve aynı düzlemde olan) - sadece bu vektörlerin büyüklükleri gereklidir çünkü hareket düz bir çizgide olduğundan dolayı problem üçboyuttan bir boyuta etkili bir şekilde düşüyor.



- , parçacığın ilk bulunduğu konum
- parçacığın son konumu
- parçacığın ilk hızı
- parçacığın son hızı
- parçacığın ivmesi
- zaman aralığı






Burada sabit ivme var veya yer çekimi etkisinde olan cisimler. Önemli nokta, her denklemin 5 değişkenden 4' ünü mutlaka içeriyor olmasıdır. Bu durumda, üç denklemi bilmek 5 değişkenin içinden geri kalan 2 değişkenin hesaplanmasına yetecektir.
Başlangıç için kullanılan denklemlerde çoğunlukla farklı bir notasyon kullanılır:

v0 yerine u, r yerine s yazılmış, ve s0=0 durumu eline alınmıştır. Bu genellikle "YİSİZ" denklemleri diye adlandırılır.[7][8]
Sabit lineer ivme: doğrudaş olmayan vektörler
Başlangıç konum, hız ve ivme vektörlerini doğrudaş olarak ele almazsak, vektör nokta çarpımını kullanarak denklem doğrudaş olmayan durumun için genişletilebilinir. Denklemlerin elde edilişi doğrudaş olan durumla aynıdır:

Torricelli denklemi [4], nokta çarpımın dağılma özelliği kullanılarak elde edilebilir.



Uygulamalar
Kinematiğin basit ve yaygın örneklerinde roketler ele alınır. Örneğin; yukarıya doğru atılan topa u hızı verildiğinde, ne kadar yukarı çıkacağı düşmeye başlamadan önce bulunabilir. İvmelenme yer çekiminden (g) kaynaklanıyor. Bu noktada hatırlanması gereken, bu denklemler skaler gibi gözükse de hızın, yer değiştirmenin ve ivmelenmenin yönleri önemlidir. Hatta tek yönlü vektörler olarak bile ele alınabilirler. s i yukarıdan yere doğru çekerse, ivmelenme -g olmalıdır, çünkü yer çekimi kuvveti aşağıya doğru etki ettiği için, bu yüzden aynı zamanda topun üstündeki ivmelenme de öyledir.
Çıkabileceği en yüksek noktada, top duracaktır v = 0. Yukarıda yazılan [4] üncü denklemi kullanarak,

Eksi işaretlerini götürerek ve v'yi yerine yazarak,

şeklinde yazabiliriz.
Sabit çembersel ivmelenme
Benzeşmesi kullanılarak rotasyon için aşağıdaki denklemleri yazabiliriz. Yine bu eksensel vektörlerin hepsi rotasyon eksenine paralel olmalı, o yüzden sadece vektörlerin büyüklükleri gereklidir.

α sabit açısal ivme, w açısal hız, w0 başlangıç açısal hızı, θ açısal yer değiştirme, θ0 başlangıç açısı ve t başlangıç konumundan son konumuna kadar geçen süredir.
Genel gezegensel hareket
Bunlar kinematik denklemlerdir ve gezegenin etrafında dönen parçacık için r = r(t) konumuyla tanımlanmıştır.[9] Aslında sadece r' nin zamana göre türevleridir ve polar koordinatlarda fiziksel niceliklerle tanımlanmıştır (açısal hız w gibi).
Parçacığın konumu, hızı ve ivmesi, sırasıyla;

polar koordinatın birim vektörleridir. İvmedeki, (–rω2) merkeze doğru olan ve 2ωdr/dt coriolis etkisinden oluşan ivmelenmelerdir.

Hareketin özel durumları tanımlanırken, bu durumlar aşağıdaki tabloda kısaca anlatılmıştır. İki tanesi zaten yukarıda tartışıldı, bu durumlarda ya yarıçapsal ya da açısal bileşeni sıfırdır ve sıfır olamayan bileşeni hareketin tektik ivmelenmeyi tanımlar.
| State of motion | Constant r | Linear r | Quadratic r | Non-linear r |
|---|---|---|---|---|
| Sabit θ | Sabit | Değişmeyen öteleme (sabit dönüşümsel hız) | Değişmeyen dönüşümsel ivme | Değişen öteleme |
| Lineer θ | Değişmeyen çembersel hareket (sabit açısal hız) | Değişmeyen açısal devinim helenazoikte, sabit açısal hız | Açısal hareket sarmal şekilde, sabit radyal ivme | Açısal hareket helenazoikte , değişen radyal ivme |
| İkinci dereceden θ | Düzenli açısal ivme çemberde | Düzenli açısal ivme helenazoikte, sabit radyal hız | Düzenli açısal ivme helenazoikte, sabit radyal ivme | Düzenli açısal ivme helenazoikte, değişen radyal ivme |
| Linner olmayan θ | Düzensiz açısal ivme çemberde | Düzensiz açısal ivme helenazoikte , sabit radyal hız | Düzensiz açısal ivme
helenazoikte sabit radyal ivme |
Düzensiz açısal ivme
helenazoikte, değişen radyal ivme |
Genel üç boyutlu hareket
Üç boyutlu uzayda, denklemler küresel koordinatlarda olduğundan daha karışık ve hantal oluyor. (r, θ, ϕ), Birim vektörleriyle birlikte, sırasıyla konum, hız ve ivme olarak sıralanabilir.


Öteleme
Hareketin kinematik denklemi, basit harmonik hareket için olan, genel frekans ve periyot (bir devirin tamamlanma süresi) ile bağlantılıdır:

Birçok sistem yaklaşık olarak basit harmonik hareketi gerçekleştirir. Karışık harmonik salınım basit harmonik hareketin süperpozisyonudur.[10]

Basit harmonik hareketin herhangi bir yönde oluşması mümkündür, neden olmasın:[10]

ve bu denklem birden çok boyutlu harmonik salınım diye bilinir. Kartezyan koordinatlarda, konumun her bileşeni süperpozisyonudur, basit harmonik motion'nın. sinüslü biçiminin.
Rotasyon
Basit harmonik hareketin rotasyonal analogu düz yolda dayanak noktasına veya eksene göre olan açısal salınımdır.

w açısal frekansı salımın hareketinin, ama dikkat edin ki açısal hız değil.
Bu biçim (hiç değilse yaklaşık olarak) tanıımlanabilir, titreşim olarak. Karışık analog yine basit harmonik salınım süperpozisyonudur.

Hareketin dinamik denklemi
Newton mekaniği
Hareket denklmeini vektör biçminde yazmak Newton'nun hareket yasalarını kullanarak basit olabilir, ama bileşenleri değişebilir ve karışık olduğundan onları çözmek kolay olmayabilir. Genellikle soruyu tam olarak çözebilmemizi engelleyecek kadar değişkenlerin fazlalığına takılabiliriz, bu yüzden newtonun yasaları parçacığın hareketini anlamada en etkili yöntem değildir. Dikdörtgen geometrisinin daha basit durumlarında, kartezyen koordinatların kullanımı çok güzel çalışır, ama diğer koordinat sistemleri üzücü bir şekilde daha karışık olabilir.
Newton'un translasyon olan ikinci yasası
İlk gelişme ve en ünlü olan gelişme Newton' un ikinci hareket yasasıdır. Bunu yazmanın birden çok yolu vardır, en çok kullanılanı;[11]

p = p(t) parçacığın momentumu ve F = F(t) parçacığın sonuç olan harici kuvvettir, parçacık üstündeki - her durumda t zaman için kullanılmıştır. Bu yasa daha popiler bir şekilde şöyle kullanılır;

m sabit olduğundan dolayı, newton mekaniğinde. Momentumun biçmi seçilebilirdir, çünkü rahatlıkla karışık sistemlere genelleştirilebilir, ve bu genelleştirmeye özel ve genel görecelikte dahildir, çünkü momentum korunabilir bir nicelik olduğundan dolayı; ki daha derin ve temel bir önem arz ettiğinden, pozisyon vektörüne göre veya momentumun zamana göre, türevine göre.[11]
Birden çok parçacık için;[5][12]

pi = i. parçacığın momentumu, Fij = j parçacığı tarafından i parçacığına uygulanan kuvvet, ve FE = soçun olan dış kuvvet. i parçacığı kendi kendisine bir kuvvet uygulamaz.
Newton'nun(Euler'in) ikinci yasası rotasyon için olan
Katı cisimler için, Newton'nun ikinci yasası rotasyon için olan aynı biçimi alır translasyon için aldığındaki;[13]

L açısal momentumdur, burada. Kuvvet ve ivmenin analog;

I burada eylemsizlik momentidir. Benzer şekilde, birden çok parçacık için, hareket denklemi yazılır bir parçacığın;[14]

L'i = açısal momentumudur i. parçacığın, τij = i. parçacığın torkudur ve τE = soçn olan dış torktur. i parçacığının kendi üstüne tork uygulayamaz.
Uygulamalar
Newton yasasının bazı örnekleri[10] sarçakın hareketinin tanımlanmasında da kullanılır;

sönümlü, kararlı harmonik salınım için;

veya bir top havaya atılmış olan, hava akımı (rüzgar gibi) direnç gösteren kuvvetlerin vektör alanı ile tanımlanan R(r, t) için;

G = yerçekimsel sabit, M = dünyanın kütlesi, ve A=R/m atılan cismin ivmesi hava akımına göre ve herhangi bir r pozisyonunda t zamanında. Newton'nun yerçekimi yasası kullanılmıştır. Atılan cismin kütlesi m nötürleşiyor işlemde.
Öklidiyen mekaniği
Euler, Newton'nun yasalarına benzeş bir şekilde katı cisimlerin hareketi için yasalar geliştirdi.
Newton–Euler denklemleri
Euler'in denklemlerini toplayıp sadece bir denkleme sığdıran denklemlerdir.
Analitik mekanik
Kısıtlamalar ve Hareket
Eğer sistemde kısıtlamalar varsa üç boyutlu düzlemin tüm koordinatlarını kullanmak gereksizdir. Genelleştirilmiş koordinatlarq(t) = [q1(t), q2(t) ... qN(t)], N sistemin tüm serbestlik derecesinin toplamı, koordinat setlerinden herhangi birini sistemin konfigürasyonunu ark boyları ve açılar biçminde tanımlanmasında kullanılır. Hatır sayılır derecede yalınlaştırmalar vardır hareketi tanımlarken, çünkü esas kısıtlamaların avantajıyla sistemin hareketini limitleyerek - mesela, birkaç koordinatta olan bir hareket minimuma indirgenmeye çalışabilinir, tüm koordinatları kullanarak tanımlanması yerine.
Genelleştirilmiş koordinatlar aşağıdakilere tekabül eder;
- onların zamana göre türevleri, genelleştirilmiş hızları: ,
- konjugate genelleştirilmiş momenta: ,
- Lagrangian konfigürasyonun fonksiyonudur q, konfigürasyonun değişim oranı dq/dt ve zaman t; ,
- Hamiltionian konfigürasyonun fonksiyonudur q, hareket p, ve zaman t;.




Lagrangian veya Hamiltonian fonksiyonu p ve q' değişkenlerini kullanarak kurulmuş bir sistemdir ve bunlar Euler-Lagrange veya Hamilton'nın denklemlerinin içine sistemin bir differansiyal denklemini elde etmek için sokulmuştur. Bunlar koordinat ve momenta için çözülür.
Genelleştirilmiş klasik hareket denklemi
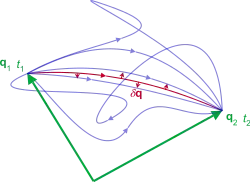
En az hareketin prensibi
Hareketin tüm klasik denklemleri, değişken prensibi tarafından elde edilebilinir.

sistemin konfigürasyon uzayında gideceği yol belirlenebilir, ve o yol en az hareketin olduğu yoldur.
Euler-Lagrange denklemleri
Euler-Lagrange denklemleri şunlardır;[2][16]

Lagrangian'da yerine koyduktan sonra, kismi türevleri hesaplanmış ve yalınlaştırılmış, ikinci derecen adi differansiyal denklem her qi için elde edilmiştir.
Hamilton denklemleri
Hamilton denklemleri şunlardır;[2][16]

Fark edilmesi gereken şudur ki, denklemler simetriktir, ( aynı biçimde kalmaktadırlar) bu değiştokuşlara yaparak eş zamanlı olarak:

Hamiltonian'da yerine koyduktan sonra, kismi türevleri hesaplanmış ve yalınlaştırılmış, iki birinci derecen adi differansiyal denklem her qi ve pi için elde edilmiştir.
Hamilton-Jacobi denklemi
Hamilton'nın formalizmi şöyle yazılabilinir;

Denklemin basit bir biçimi olduğu halde, aslında bir lineear olmayan kısmi bir diferansiyel denklemdir, ilk derecesi N+1 değişkenli olan, 2Nli olması yerine. S aksiyonundan dolayı, korunabilir nicelikleri tanımlarken kullanılabilir, mekanik sistemlerde, hatta ne zaman bu mekanik problemin kendisi tam olarak çözülemez, çünkü fiziksel sistemin aksiyonun diferansiyallenebilir simetrisi korunum kanuna uygun düşer. Bu teori Emmy Noether sayesinde vardır.
Kaynakça
- Encyclopaedia of Physics (second Edition), R.G. Lerner, G.L. Trigg, VHC Publishers, 1991, ISBN (Verlagsgesellschaft) 3-527-26954-1 (VHC Inc.) 0-89573-752-3
- Analytical Mechanics, L.N. Hand, J.D. Finch, Cambridge University Press, 2008, ISBN 978-0-521-57572-0
- Halliday, David; Resnick, Robert; Walker, Jearl (16 Haziran 2004). Fundamentals of Physics (7 Sub bas.). Wiley. ISBN 0-471-23231-9.
- Classical Mechanics, T.W.B. Kibble, European Physics Series, 1973, ISBN 0-07-084018-0
- Dynamics and Relativity, J.R. Forshaw, A.G. Smith, Wiley, 2009, ISBN 978-0-470-01460-8
- M.R. Spiegel, S. Lipcshutz, D. Spellman (2009). Vector Analysis. Schaum's Outlines (2nd bas.). McGraw Hill. s. 33. ISBN 978-0-07-161545-7.
- Hanrahan, Val; Porkess, R (2003). Additional Mathematics for OCR. Londra: Hodder & Stoughton. s. 219. ISBN 0-340-86960-7.
- Keith Johnson (2001). Physics for you: revised national curriculum edition for GCSE. 4th. Nelson Thornes. s. 135. ISBN 978-0-7487-6236-1.
The 5 symbols are remembered by "suvat". Given any three, the other two can be found.
- 3000 Solved Problems in Physics, Schaum Series, A. Halpern, Mc Graw Hill, 1988, ISBN 978-0-07-025734-4
- The Physics of Vibrations and Waves (3rd edition), H.J. Pain, John Wiley & Sons, 1983, ISBN 0-471-90182-2
- An Introduction to Mechanics, D. Kleppner, R.J. Kolenkow, Cambridge University Press, 2010, p. 112, ISBN 978-0-521-19821-9
- Encyclopaedia of Physics (second Edition), R.G. Lerner, G.L. Trigg, VHC publishers, 1991, ISBN (VHC Inc.) 0-89573-752-3
- "Mechanics, D. Kleppner 2010"
- "Relativity, J.R. Forshaw 2009"
- R. Penrose (2007). The Road to Reality. Vintage books. s. 474. ISBN 0-679-77631-1.
- Classical Mechanics (second edition), T.W.B. Kibble, European Physics Series, 1973, ISBN 0-07-084018-0