Ackermann direksiyon geometrisi
Ackermann direksiyon geometrisi, farklı yarıçapların çevrelerini takip etmeye ihtiyaç duyan bir dönüşün içindeki ve dışındaki tekerleklerin, problemini çözmek için tasarlanmış, bir otomobilin veya başka bir aracın direksiyonundaki bağlantıların geometrik bir düzenlemesidir.
1817'de Münih'teki Alman araba üreticisi Georg Lankensperger tarafından icat edildi, daha sonra 1818'de İngiltere'deki acentesi Rudolph Ackermann (1764-1834) tarafından atlı arabalar için patentlendi.
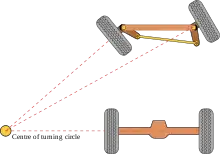
Ackermann geometrisinin amacı, bir eğri etrafındaki yolu takip ederken, lastiklerin yanlara kaymasını önlemektir.[1] Bunun geometrik çözümü, tüm tekerleklerin akslarının ortak bir orta noktaya sahip daire yarıçapları olarak düzenlenmesidir. Arka tekerlekler sabitlendiğinden, bu orta nokta arka akstan uzatılmış bir hat üzerinde olmalıdır. Bu hattaki ön tekerleklerin eksenlerinin de kesişmesi, yönlendirme sırasında, iç tekerleğin dış tekerlekten daha büyük bir açıyla döndürülmesini gerektirir.[1]
Kaynakça
- Norris, William (1906). "Steering". Modern Steam Road Wagons. Longmans. ss. 63-67.
Dış bağlantılar
- Ackerman concept used on Yamaha motorcycle, Niken25 Ekim 2018 tarihinde Wayback Machine sitesinde arşivlendi.
- 2002 technical paper on Ackermann steering linkage design4 Ekim 2018 tarihinde Wayback Machine sitesinde arşivlendi.
- Ackerman? Or not? Does it matter?
- True Ackermann & Dynamic generated Ackermann
- Common fitting error on old Ford vehicles when tie rod is fitted in front of the axle28 Temmuz 2014 tarihinde Wayback Machine sitesinde arşivlendi.
- Problems experienced that may be due to excessive Ackermann or insufficient Ackermann13 Ocak 2020 tarihinde Wayback Machine sitesinde arşivlendi.
- Ackermann Steering and Racing Circle (oval) Tracks, includes the toe out effect when Ackermann steering geometry is included and its use in racing20 Ocak 2020 tarihinde Wayback Machine sitesinde arşivlendi.
Şasi kontrol sistemleri | |
|---|---|
Otomobil serisinin parçaları | |
| Süspansiyon |
|
| Direksiyon |
|
| Frenler |
|
| |
| |
Şablon:Güç aktarım