Sürekli ortamlar mekaniği
Sürekli ortamlar mekaniği, ayrı parçacıklar yerine tam bir kütle olarak modellenen maddelerin mekanik davranışları ve kinematiğin analizi ile ilgilenen mekaniğin bir dalıdır. Fransız matematikçi Augustin-Louis Cauchy, 19. yüzyılda bu modelleri formüle dökmüştür, fakat bu alandaki araştırmalar günümüzde devam etmektedir.
| Sürekli ortamlar mekaniği |
|---|
 |
|
Yasalar
|
|
Katı mekaniği
|
|
|
|
Açıklama
Sürekli ortam olarak modellenen cisim boşlukları tamamen kendi maddesi ile dolduran cisimler olarak farz edilir. Bu modelleme, maddenin atomdan yapıldığını inkâr etmiş olur, bu yüzden sürekli değildir. Ancak uzun ölçeklerinde atomlar arası mesafelerden daha büyüktür, bazı modeller doğrudur. Esas fizik kurallarında mesela kütlenin korunumu, momentum korunumu ve enerji korunumu, bazı objelerin davranışlarının açıklayan diferansiyel denklemlerin türetilmesi için bazı modeller ve yapıcı ilişkiler yolu ile eklenen belirli malzeme çalışmaları hakkındaki bazı bilgiler için uygulanabilirler.
Sürekli ortamlar mekaniği, herhangi bir koordinat sisteminin gözleminden bağımsız olan katı ve sıvıların fiziksel özellikleri ile uzlaşır. Bu özellikler daha sonra tansörler ile tanımlanır ki tansörler, koordinat sisteminden bağımsız olmanın özelliğini gerektiren matematiksel nesnelerdir. Bu tansörler hesaplamalı kolaylık için koordinat sisteminde ifade edilebilir.
Sürekli ortamlar kavramı
Malzemeler, örneğin katı, sıvı ve gaz, boş bir alanda dağılmış moleküllerin oluşumudur. Mikroskobik ölçeklerde, malzemeler çatlaklara sahiptirler ve süreksizdirler. Lakin kesin fiziksel olgular, maddelerin sürekli ortam gibi var olduğunu farz ederek modellenebilirler, yani cismin içindeki madde, sürekli olarak boşluğun içindeki tüm alanlara dağılmış ve doldurmuştur. Bir sürekli ortam, dökme malzemeler olan özellikler ile sonsuz elementlere bölünerek oluşabilecek bir gövdedir.
Sürekli varsayımın geçerliliği, ya istatistiksel homojeniklik ve mikro varoluşun ergodikliği ya da bazı açık frekanslar ile tanımlanabilen teorik analizler tarafından doğrulanabilir. Spesifik olarak, süreklilik hipotezi, tipik hacim elamanlarının kavramları(RVE) üzerinde ve Hill-Mandel koşullarına göre ölçeklerin ayrılmasına dayanak oluşturur. Bu koşullar, mikro yapının mekânsal ve istatistiksel ortalamasındaki yol gibi yapıcı denklemler üzerindeki deneyciler ile teorikçilerin bakış açısı arasında bağlantı sağlar.[1]
Ölçeklerin ayrılması muhafaza edilmediği zaman ya da biri tipik hacim elemanlarının boyutundan daha ince bir çözünürlüğün bir sürekliliğini kurmak istediği zaman, biri, bir istatistiksel hacim elemanı(SVE) kullanır ki bu rastgele sürekli ortamlara yol açar. İkincisi, stokastik sonlu elemanlar için bir mikro mekanik temel sağlar. Tipik hacim elemanı ve istatistiksel hacim elemanının seviyelerine göre, istatistiksel mekaniğe sürekli mekanik bağlantılıdır. Kurucu tepki, mekânsal homojen olduğu zaman, RVE deneysel test yolu ile sınırlı bir şekilde değerlendirilir.
Özellikle sıvılar için, Knodsen sayısı, ne derece süreklilik yaklaşımı yapılabileceğini değerlendirilebilir.
Araç trafiği tanıtım için bir örnektir
Basitlik için tek bir şeritte --- bir karayolu üzerinde araç trafiğini göz önünde bulundurun. Şaşırtıcı bir şekilde, etkileyici bir övgü içinde, süreklilik mekaniği kısmi diferansiyel yolu(PDE) ile araçların hareketlerini araç yoğunluğu için etkili bir şekilde tasarlar. Bu durumun benzerliği, sürekli modelleme altında yatan sürekli-ayrık ikiliğin biraz anlaşılmasında bizi güçlendirir.
Modellemeye başlamak için bunları tanımlarsak: karayolu boyunca mesafeyi ölçmek ( km cinsinden); zaman (dakika cinsinden); karayollarındaki araba yoğunluğu (arabalar/km ) , konumundaki araçların ortalama hızları..




PDE’nin korunumunu sağlama
Araçlar belirir ve belirmezler. . Herhangi bir grup aracı ele alalım nin arkasında konumlanan özel arabalar ve önünde konumundaki arabalar. Bu gruptaki toplam arabaların sayısı . Arabalar istikrarlı haldeyken . Fakat matematiğin temel teoremi aracılığı ile




Bu integral . aralığı içerisinde tüm gruplar için sıfırdır. İntegralin bütün aralıklarda sıfır olabilmesi için integrandın bütün değerlerinde sıfır olması gerek. Sonuç olarak, koruma, birinci dereceden doğru olmayan PDE muhafazasını türetir

karayolunun bütün konumları için.
PDE'nin bu korunumu, sadece araba trafiğine değil, aynı zamanda sıvıların, katıların, kalabalıklar, hayvanlar, bitkiler, Orman yangınları, finansal tüccarlar içinde geçerlidir.
Gözlem sorunu kapatır
Bu PDE, iki bilinmeyen içindeki tek denklemdir, bu yüzden sorunu iyi pozisyona getirebilmek için başka bir denkleme ihtiyacımız var. Bu gibi ilave bir denklem, tipik olarak deneyden gelen ve sürekli mekanik içinde benzer bir ihtiyaçtır. Araç trafiği için, bu genellikle araçların yoğunluğuna bağlı bir hızda seyahat etmesi için iyi bir kurgudur, bazı deneysel fonksiyonların açıklanmasında yoğunluğun azalan fonksiyonudur. Örneğin, Lincoln tünelindeki deney, güzel bir uyum bulunmuştur New York’ta. (km/saatteki arabaların yoğunluğu/km).[2]



Böylece araç trafiği için basit süreklilik modeli PDEdir.
için.
Modellerin formülasyonu
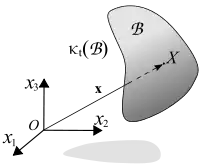
Sürekli mekanik modeller, malzeme cismi modellemeye üç boyutlu Euclidean uzayda belirlenen bir bölge tarafından başlar. Bu bölgedeki noktaya malzeme noktası veya parçacık denir. Cismin farklı yapılandırmaları veya durumları, Euclidean boşlukta farklı bölgelere karşılık gelir. zamandaki cismin yapılandırmasına karşılık gelen bölgede işaretlenir .



zamandaki cismin yapılandırmasına karşılık gelen bölgede işaretlenir
problemler için seçilen bazı referans çerçevesinde koordinat vektörüdür. Bu vektör, bazı referans yapılandırmaları içindeki konum parçacığının fonksiyonu olarak ifade edilir. bu yüzden


bu fonksiyonun çeşitli özelliklerinin olması gerekiyor bu yüzden modeller fiziksel anlam oluştururlar.

- Zaman içinde sürekli, bu yüzden cisim gerçekçi bir şekilde değişir.
- Her zaman küresel ters çevirme, bu yüzden cisim kendini kesmez.
- Oryantasyon koruyucu, doğada mümkün olmayan ayna yansımaları üreten dönüşümler.
Modellerin matematiksel formülleri için, de iki kez türevlenebilir olduğu varsayılabilir, bu yüzden hareketi açıklayan diferansiyel denklemler formüllenebilir.

Sürekli ortamdaki kuvvet
Sürekli ortamlar mekaniği, katı cisimlerin tersine deforme cisimler ile uyuşur. Bir katı, makaslama kuvvetine sahip deforme cisimdir, öyle ki bir katı makaslama kuvvetini destekleyebilir. Sıvılar, diğer yandan, makaslama kuvveti bulundurmaz. Katı ve sıvıların mekanik davranış çalışmaları için, kabul edilebilir sürekli cisimler olmalıdır ki bunun anlamı da, boşluğu barındıran tüm bölgeler madde ile doludur ki bu madde atomlardan oluşmasına rağmen, boşluklara sahip ve kesiklidir. Bundan dolayı, sürekli ortamlar mekaniği, bir noktaya veya bir atomik parça ya da atomlar arası boşluğun içindeki bir noktayı tanımlamayan sürekli bir cisimdeki parçacığa değindiği zaman, bu noktayı işgal eden bir cismin idealleştirilen bir parçası değildir.
Newton ve Euler’in klasik dinamiğine takiben, bir kütlesel cismin hareketi, harici hareketin uyguladığı iki türlü olduğu varsayılan kuvvetler tarafından sağlanır; yüzeysel kuvvet ve cismin kuvveti .[3] Böylece toplam kuvvet kütleye ve kütlenin bir kısmına uygulanan kuvvet şu şekilde tanımlanabilir:



Yüzeysel ya da temas kuvveti, birim alandaki kuvvet olarak ifade edilir, cismin sınırlayan yüzeyi üzerinde bile hareket edebilir, diğer cisimler ile mekanik temasın veya hayali iç yüzeyler ki cismin bağlanmış bölümlerinin sonucu olarak, cismin iki yüzeyi arasındaki bölümlerinin arasındaki mekanik etkileşim sonucu olarak. Bir cisim, harici yüzeysel bir kuvvet tarafından hareket ettiği zaman, dâhili yüzey kuvveti, çizgisel ve açısal momentum korunumu Newton’un ikinci hareket yasasına göre, cismin içinde noktadan noktaya hareketlerini dengelemek için iletilmiştir. Dâhili yüzey kuvveti, yapıcı denklemler yoluyla cismin bozulması ile bağlantılıdır. Dâhili yüzey kuvveti, cismin maddesel donanımının serbestiyeti ve onların cismin hareketini nasıl ilişkilendirdiği sayesinde matematiksel olarak tanımlanabilir.[4]
Cismin hacmi boyunca iç yüzeyindeki kuvvetin dağılımı, sürekli olduğu kabul edilir. Bu yüzden bir tane yüzey kuvvet yoğunluğu ya da verilen [3] zamanındaki cismin belirli bir biçimindeki bu dağılımı ifade eden .Cauchy çekiş alanı mevcuttur.Bu vektör alanı değildir. Çünkü bu sadece belirli bir maddenin noktasının pozisyonuna değil, aynı zamanda onun normal vektörü ile tanımlı olarak yüzeysel elemanların yerel oryantasyonuna da bağlıdır.[5]




Herhangi bir diferansiyel alan normal vektörü ile verilen iç yüzeyin alanın , yüzeysel kuvvet cismin bir bölümünü saran 'nin,her bir tarafındaki cismin her bölümleri arasındaki ilişkiden oluşur.



yüzeysel çekiştir,[6] veya gerilme vektörü,[7] gerilme,[8] veya çekiş vektörü denir.[9] Gerilme kayıtsız yapı vektörüdür. (bakınız Euler-Cauchy's stress principle).

Belirli iç yüzeydeki toplam iletişim kuvveti, bütün diferansiyel kuvvetlerdeki iletişim kuvvetlerinin toplamı olarak ifade edilebilir:
Eğer yerçekimsel çekimi içeren, bütün dış etkilerin yokluğundaki şeklini koruyan ve cismi bir arada tutmak için gerekli olan mevcut kuvvetler( iyonik, metalik ve van der Wall kuvvetleri), atomlar arası kuvvetler ise süreklilik mekaniğindeki bir cisim stressiz olarak düşünülür.[9][10] Gerilmeler, cismin içindeki gerilmeler düşünüldüğünde, dışlanan özellikli bir yapılandırmalar için cismin imalatı boyunca genellenebilir. Dolayısıyla, süreklilik mekaniğinde düşünülen gerilmeler, sadece cismin bozulmalarından sağlananlardır mesela, sadece gerilmedeki göreceli değişimler kabul edilebilir, gerilmedeki kesin değerler kabul edilmez.
Cisim kuvveti, cismin hacmi veya kütlesindeki hareketi olan cismin harici kaynaklarından meydana gelen kuvvettir[11] Özdeyiş, cisim kuvvetleri, yalnız iletişim kuvvetleri boyunca belirtilen cismin iç kuvvetlerinin farklı bölümleri arasındaki etkileşim, dış kaynakların bulundurulmasına bağlıdır. [6] Bu kuvvetler, kuvvet alanlarındaki cismin varlığından ortaya çıkar. Örneğin, manyetik alan, yerçekimi alanı veya hareket halindeki cisimlerin iç kuvvetleri. Sürekli cismin kütlesi, yayılmış olduğu varsayılarak, kütleden meydana gelen herhangi bir kuvvette yayılmış olarak kabul edilir. Böylece, cisim kuvvetleri, cismin tüm hacmi üzerinde sürekli varsayılan vektör alanları tarafından belirtilir,[12] Cismin kuvveler, farklı yapı vektör alanları olan cismin kuvvet yoğunluğu (birim kütle) tarafından tanımlanabilir.

Yerçekimi kuvvetleri halinde, kuvvetlerin yoğunluğu, cismin kütle yoğunluğu ve kuvvetin birim kütlesinin () veya birim hacminin (). cinsinden belirtilmesine bağlı veya orantılıdır. Bu iki teknik denklemi ile maddenin yoğunluğu tanımlanır. Aynı zamandan elektromanyetik kuvvetin yoğunluğu, elektromanyetik alanın gücüne bağlıdır.




Sürekli cisme etkiyen toplam kuvvet:
Cisme etki eden cisim kuvveti ve temas kuvveti, belirli bir nokta ile ilgili moment kuvvetine karşılık gelen yoldur. Bu yüzden orijindeki toplam etkiyen dönme momenti şöyle verilir:

Kesin koşullarda, materyallerin mekanik davranışlarının analizinde yaygın olmayan, O, diğer iki tür kuvveti içinde bulundurmak için önemli olur: bunlar, cismin momenti ve çift gerilmelerdir.[13][14] (yüzey çiftleri,[11] temas momenti [12]). Cismin momenti, cismin hacmine birim hacimde veya birim kütlede etkiyen momentlerdir. Çift gerilmeler, yüzeye birim alana uygulanan momenttir. Her ikisi de metallerin bozulma teorisi, bir katının üstündeki harici manyetik alan, materyallerin moleküler yapısının önemli kısımları ve katılaşmış dielektrik katının elektrik alanındaki hareketi için gerilim analizinde önemlidir.[7][8][11]
Materyaller, özellikle kuvvet ile sağlanan momentin sergilenen cisim çiftleri ve çift gerilmeler, kutuplu materyallerdir.[8][12] Kutupsuz materyaller, sadece kuvvet momentinin materyalleridir. Süreklilik mekaniğinin klasik dallarında gerilmeler teorisinin gelişmeleri, kutupsuz materyallere göredir.
Böylece, cismin içindeki dönme momentleri ve uygulanan bütün kuvvetlerin toplamı şu şekilde verilir;
Kinematik: deformasyon ve hareket
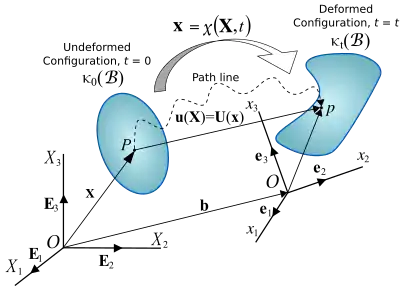
Sürekli bir cismin yapılandırmasının içindeki bir değişim, yer değiştirmedir. Cismin yer değiştirmesinin iki bileşeni vardır; katı cisim yer değiştirmesi ve deformasyon. Katı cismin yer değiştirmesi eş zamanlı çeviri ve cismin şeklini ve büyüklüğünü değiştirmeden onun dönüşünden oluşur. Deformasyon, ilk veya bozulmamış yapıdan bir akıma veya bozulmuş yapıya olan cismin büyüklüğü ve şeklindeki değişmelerle açıklanır (Şekil 2).

Sürekli cismin hareketi, yer değiştirmelerin sürekli zaman dizisidir. Böylece, materyal cisim farklı zamanlarda farklı yapılandırmaları işgal edecektir bu yüzden bir parçacığı bir dizi evrende bir yörüngeyi belirten noktaları işgal eder.
Sürekli cismin hareketi veya deformasyonu boyunca devamlılık mevcuttur:
- Herhangi bir andaki kapalı eğim olarak oluşan materyal noktalar, daha sonraki zamanlarda da kapalı bir eğim olarak oluşacaktır.
- Herhangi bir andaki kapalı yüzey olarak oluşan maddesel noktalar, maddenin içindeki her zaman içinde duracak olan kapalı yüzeyde ve daha sonraki zamanlarda da kapalı bir yüzey olarak oluşacaktır.
O, referans yapılandırma veya bütün sonraki yapılandırmalardan yararlanılan biçim olan başlangıç koşulları kolayca tanımlanabilir. Referans yapılandırma, işgal edilebilecek cisim olmak zorunda değildir. Çoğu zaman, daki yapılandırma, referans yapılandırma olarak düşünülür, . Bileşenler bir parçacığın konum vektörüne ait bileşenler, referans yapılandırmaya göre alınan- referans koordinatı veya materyal denir.



Deformasyon veya katıların hareketi veya sıvıların uçuşu analiz edilirken, O, zaman içindeki yapılandırmanın devrimi ya da dizilerin tanımlanmasında önemlidir. Hareket için bir açıklama, referansal koordinat ya da materyal açısından yapılır ve materyal açıklaması veya Lagrange açıklaması denir.
Lagrange Açıklama
Lagrange açıklamada, parçacıkların konumları ve özellikleri madde veya referansal koordinat ve zaman cinsinden tanımlanır. Bu durumda, referans yapılandırma 'daki yapılandırmadır. Referansın referansal çerçevesinde duran bir gözlemci, zaman niteliğinde uzayda hareket eden maddesel cisim gibi fiziksel özellikler ve konumdaki değişiklikleri gözlemler. Elde edilen sonuçlar, referans yapılandırma ve başlangıç zamanın seçiminin özgürlüğüdür .

Bu açıklama, normalde katı mekaniği kullanıldı. Lagrange açıklamada, sürekli cismin hareketi,. fonksiyonunun haritalanması ile tanımlanır. (Şekil 2),

Ki başlangıç yapılandırmasının şimdiki veya deforme edilmiş yapılandırmadan ,üzerine şimdiki yapılandırmanın bir haritalanmasıdır, bunlar arasındaki geometrik ilişkiyi gösteren bu parçacık , konum vektörü ile deforme olmamış ve referans yapılandırmasından ,zamanda şimdiki veya deforme edilmiş yapılandırması , zamanda elde edilir. bileşenlerine mekansal koordinat denir.




Fiziksel ve kinematik özellikler , ,termodinamik özellikler ve akışkan hız, ki bunlar maddesel cismin özelliklerini karakterize eden veya betimleyen özellikler, konum ve zamanın sürekli fonksiyonları olarak ifade edilir. .


Bir sürekliliğin herhangi bir özelliğinin maddesel türevi, vektör, skaler veya tensor olabilen, hareketli sürekli cismin parçacıklarının belli bir grubu için bu özelliklerdeki değişimlerin zamana oranıdır. Maddesel türev, konvektif veya mevcut türev olarak da bilinir. Bu gruptaki parçacıklarla hareket eden bir gözlemcinin ölçüldüğü zamanda değişen özelliklerdeki oran olarak düşünebilir.
Lagrange açıklamada, maddesel türev, zamana bağlı kısmi türevdir ve konum vektörü izamanla değişmeyecek şekilde sabit tutar. Böylece:
Ani konum bir parçacığın özelliğidir ve onun maddesel türevi, parçacığın ani akışkan hızıdır . Bu yüzden, sürekliliğin akışkan hız alanı şu şekilde verilir: Aynı şekilde, ivmelenme alanı şu şekilde verilir:


Aynı şekilde, ivmelenme alanı şu şekilde verilir:
Lagrange açıklamadaki devamlılık, maddesel noktanın başlangıç yapılanmasından şimdiki yapılanması ile haritalanmanın mekânsal ve zamansal sürekliliği tarafından açıklanabilir. Sürekliliği karakterize eden bütün fiziksel nicelikler, bu yolla tanımlanır. Bu anlamda and fonksiyonları tek değerli ve süreklidirler, ne olursa olsun istenilen zaman ve uzaya göre sürekli türevler ile, genelde ikinci ya da üçüncü.


Euler tanımı
Süreklilik, halen başlangıç veya referans yapılandırmalarında bulunan x in konumlandırılmasındaki parçacığı bulunduran nun tersi ile teyit edilir. Bu nedenle, hareketin tanımı mekânsal yapılandırma . yapılandırma ile yapılır, bu durumda mekânsal tanım veya Euler tanımı denir ve şimdiki yapılandırılma referans yapılandırma olarak ele alınır.
Euler tanımı, şimdiki yapılandırmaya odaklanan d'Alembert, tarafından tanıtılır ki bu uzayda ilerleyen zamandaki oluşan herhangi bir noktaya verilen önem, uzay ve zamanda ilerleyen tekil parçacıklar yerine verilen önemdir , Bu yaklaşım, uygun bir şekilde kinematik varlıklarda veya büyük ilgi, referans zamandaki akışkan cismin şeklinden ziyade yerine alınan değişimdeki hızdaki akışkan sıvının çalışmalarına uygulanır.[15]
Matematiksel, Euler tanımı kullanılan bir süreklilik hareketi, fonksiyonun şekillendirilmesi ile açıklanır:
şimdi konumlanan parçacığa şimdiki yapılandırma içinde orijinal konumuna başlangıç yapılandırmasının takip sağlar.
Bu ters fonksiyonların varlığı için gerekli ve yeterli koşullar, Jacobian Matrix ‘ın belirleyici faktörü, sıfırdan farklı ve sık sık Jacobian tarafından önerildi. Böylece;
Euler tanımında, fiziksel özellikler şu şekilde açıklanır:
Lagrange tanımındaki ‘in fonksiyonel formu, Euler tanımındaki ile aynı değildir

,in zincirleme kuralı kullanılan maddesel türevi,

Bu denklemin sağ el tarafındaki ilk terim, x konumunda oluşan özelliğin değişim yerel oranını verir.
Euler tanımındaki süreklilik, mekânsal ve zamansal süreklilik ve akış hızı alanının sürekli diferansiyellenebilirlik tarafından ifade edilir. Bütün fiziksel özellikler, her bir anlık zamanda, şimdiki yapılandırmadaki, konum vektörünün bir fonksiyonu olarak bu yolla tanımlanır.
Yer değiştirme alanı
Deforme ve deforme olmayan yapılandırmalardaki parçacığın konumunu bulunduran vektöre yer değiştirme vektörü denir ve Lagrange tanımında , ile Euler tanımında , şeklinde ifade edilir.



Yer değiştirme alanı, bir cismin içindeki bütün parçacıklar için yer değiştirme vektörlerinin hepsinin vektör alanlarına denir ki bu deforme ve deforme olmayan konfigürasyonlara bağlıdır. Bu, deformasyonun analizinde ya da yer değiştirme açısından bir sürekli cismin hareketini uygun olarak yapar. Genel de, yer değiştirme alanı, maddesel koordinatlar ile ifade edilir:
Ya da mekânsal koordinatlar cinsinden:
birim vektörleri ve , ile mekânsal ve maddesel koordinat sistemleri arasındaki mesafenin kosinüsüdür.


ile arasındaki ilişki şu şekilde gösterilir:


Şunu biliyoruz
dolayısıyla:
Bu, sonucu , ve uzaklık kosinüsü Kronecker deltası olan deforme ve deforme olmayan konfigürasyonlar için koordinat sistemi yaygın olarak ekler.

Böylece elimizde bunlar var:
Ya da mekânsal koordinat cinsinden:
Hüküm denklemleri
Sürekli mekanik, belirli bir uzunluk ve zaman ölçekleri için sürekli olarak yaklaşılan materyallerin davranışları ile uyuşur. Denklemler, kütle momentum ve enerji için denge yasaları içeren bazı materyallerin mekaniğini yönetir. Kinematik bağıntı ve yapıcı denklemler, hüküm denklemlerinin sistemini tamamlamak için gereklidir. Termodinamiğin ikinci yasasını gerektirerek uygulanabilen yapıcı bağıntıların biçimindeki fiziksel kısıtlamalar, her koşulda yerine getirilebilir. Katıların sürekli mekaniğinde, eğer entropi eşitsizliğinin Clasius-Dohem yapısı karşılanabilirse, termodinamiğin ikinci yasası karşılanabilir.
Denge yasaları, üç nedenden kaynaklanan hacmin içindeki özelliklerin (kütle, momentum ve enerji) değişiminin oranı olan fikir ile ifade edilir:
- Fiziksel özelliklerin kendisi, hacmi sınırlayan yüzey boyunca akışkandır,
- Hacmin yüzeyinde fiziksel özelliklerin bir kaynağı vardır veya,
- Hacmin içinde fiziksel özelliklerin bir kaynağı vardır.
cisim olsun (Euclidian uzayının açık bir alt kümesi) ve yüzeyi olsun ('in limiti).


Cismin içindeki maddesel noktaların hareketi, harita ile şu şekilde tanımlansın;
başlangıç yapılandırmasındaki konum ve deforme konfigürasyon içindeki aynı noktanın yeridir.
Deformasyon eğim şu şekilde verilir:
Denge yasaları
cisim boyunca akışkan olan fiziksel özellikler olsun. cismin yüzeyindeki kaynak ve cismin içindeki kaynak olsun. yüzeye dışa doğru normal birimi olsun. akışkan olan fiziksel özellikleri taşıyan fiziksel parçacıkların akış hızı olsun. Sınırlayıcı yüzeydeki hız ( yönünde)olsun






Daha sonra, denge yasaları, genel haliyle şu şekilde ifade edilebilir; .
, , ve fonksiyonları, denge denklemleri ile uyuşan fiziksel özelliklere bağlı olarak, skaler, vektörel ve tensor değerleri olabilir. Eğer cismin iç sınırları varsa, sıçrama süreksizlikleri de denge yasaları ile tanımlanabilir.
Eğer biz görünümün Euler noktasını alırsak, bu, enerji, kütle ve momentumun denge yasaları gösterilebilir, şu şekilde yazılan bir katı için:
Yukarıdaki denklemlerde, madde yoğunluğu maddenin zamanı,‘in türevi, parçacık hızı, maddesel zaman, ‘in türevi , Cauchy’nin gerilme tensoru, cismin kuvvet yoğunluğu, birim kütledeki başlangıç enerjisi, maddesel zaman, ‘nin türevi, ısı akı vektörü ve birim kütlenin bir enerji kaynağıdır.











Referans yapılandırmaya göre, denge yasaları şu şekilde yazılabilir:
Yukarıda, Piola-Kirchhoff gerilme tensorudur ve referans konfigürasyondaki kütle yoğunluğudur. Birinci Piola-Kirchhoff gerilim tensoru, Cauchy’nin gerilim tensorune bağlıdır şu şekilde:


Biz alternatif olarak, birinci Piola-Kirchhoff gerilme tensörünün aktarması olan nominal gerilme tensörünü tanımlayabiliriz. Öyle k

Denge yasaları;
Yukarıdaki denklemlerin içindeki kullanılanlar, şu şekilde tanımlanır:
vektör alanı, ikinci dereceden tensör alanı, Geçerli yapılandırmada bir ortonormal baz bileşenleridir. Ayrıca,

vektör alanı, ikinci dereceden tensör alanı, ve referans konfigürasyonundaki ortonormal tabanın bileşenleridir.

İç çarpım şu şekilde tanımlanır:
Clausius–Duhem eşitsizliği
Clausius–Duhem eşitsizliği, elastik-plastik maddeler için termodinamiğin ikinci yasasını ifade edebilmek için kullanılabilir. Bu eşitsizlik, doğal sürecin ters çevrilemezliğini ilgilendiren bir ifadedir, özellikle enerji kaybedildiğinde.
Önceki bölümde denge yasalarında olduğu gibi, biz bir özelliğin bir akısı, entropi yüzeyi ve ilgili bölgedeki birim kütledeki bir dâhili entropi yoğunluğu () olduğunu varsayarız.

bir bölge, bu da limiti olsun. Böylece, bu bölgedeki ’ın artmasının oranı olan termodinamiğin ikinci yasası, uygulanan ‘ın toplamına ve bölgenin içinde ve dışında uçuşan maddeler yüzünden dâhili entropi yoğunluğuna eşit veya daha büyüktür.
akış hızı ile hareket etsin ve içindeki parçacıkların hızı olsun. yüzey limitine dış normal birimi olsun . bölgedeki maddenin yoğunluğu, yüzeydeki entropi akısı, birim kütledeki entropi kaynağı olsun. Sonra, entropi eşitsizliği şu şekilde yazılabilir:


Skaler entropi akısı, bağıntısı tarafından yüzeydeki vektör akısı ile ilişkilendirilebilir. Aşamalı izotermal koşulların varsayımı altında, elimizde:

ısı akı vektörü, birim kütlenin enerji kaynağı, ve maddesel noktanın mutlak sıcaklığıdır ve konumun zamandaki değeridir.



Sonra elimizde Clausius–Duhem eşitsizliğinin integrali var;
Entropi eşitsizliğini türev cinsinden yazılabildiğini göstereiliriz;
Cauchy gerilimi ve iç enerji, Clausius–Duhem eşitsizliği yazılabilir;
Uygulamalar
Ayrıca bakınız
- Bernoulli's principle
- Cauchy elastic material
- Configurational mechanics
- Curvilinear coordinates
- Equation of state
- Finite deformation tensors
- Finite strain theory
- Hyperelastic material
- Lagrangian and Eulerian specification of the flow field
- Movable cellular automaton
- Peridynamics (a non-local continuum theory leading to integral equations)
- Stress (physics)
- Stress measures
- Tensor calculus
- Tensor derivative (continuum mechanics)
- Theory of elasticity
Notlar
- Ostoja-Starzewski, M. (2008). "7-10". Microstructural randomness and scaling in mechanics of materials. CRC Press. ISBN 1-58488-417-7. 29 Ağustos 2013 tarihinde kaynağından arşivlendi. Erişim tarihi: 5 Haziran 2015.
- A.
- Smith & Truesdell p.97
- Slaughter
- Lubliner
- Liu
- Wu
- Fung
- Mase
- Atanackovic
- Irgens
- Chadwick
- Maxwell pointed out that nonvanishing body moments exist in a magnet in a magnetic field and in a dielectric material in an electric field with different planes of polarization.
- Couple stresses and body couples were first explored by Voigt and Cosserat, and later reintroduced by Mindlin in 1960 on his work for Bell Labs on pure quartz crystals.
- Spencer, A.J.M. (1980). Continuum Mechanics. Longman Group Limited (London). s. 83. ISBN 0-582-44282-6. 29 Temmuz 2020 tarihinde kaynağından arşivlendi. Erişim tarihi: 5 Haziran 2015.
Kaynakça
- Batra, R. C. (2006). Elements of Continuum Mechanics. Reston, VA: AIAA.
- Chandramouli, P.N (2014). Continuum Mechanics. Yes Dee Publishing Pvt Ltd. ISBN 9789380381398. 4 Ağustos 2018 tarihinde kaynağından arşivlendi. Erişim tarihi: 5 Haziran 2015.
- Eringen, A. Cemal (1980). Mechanics of Continua (2nd edition bas.). Krieger Pub Co. ISBN 0-88275-663-X.
- Chen, Youping (2009). Meshless Methods in Solid Mechanics (First Edition bas.). Springer New York. ISBN 1-4419-2148-6.
- Dill, Ellis Harold (2006). Continuum Mechanics: Elasticity, Plasticity, Viscoelasticity. Germany: CRC Press. ISBN 0-8493-9779-0. 25 Mayıs 2013 tarihinde kaynağından arşivlendi. Erişim tarihi: 5 Haziran 2015.
- Dimitrienko, Yuriy (2011). Nonlinear Continuum Mechanics and Large Inelastic Deformations. Germany: Springer. ISBN 978-94-007-0033-8.
- Hutter, Kolumban; Klaus Jöhnk (2004). Continuum Methods of Physical Modeling. Germany: Springer. ISBN 3-540-20619-1. 9 Ocak 2014 tarihinde kaynağından arşivlendi. Erişim tarihi: 5 Haziran 2015.
- Fung, Y. C. (1977). A First Course in Continuum Mechanics (2nd bas.). Prentice-Hall, Inc. ISBN 0-13-318311-4.
- Gurtin, M. E. (1981). An Introduction to Continuum Mechanics. New York: Academic Press.
- Lai, W. Michael; David Rubin; Erhard Krempl (1996). Introduction to Continuum Mechanics (3rd edition bas.). Elsevier, Inc. ISBN 978-0-7506-2894-5. 6 Şubat 2009 tarihinde kaynağından arşivlendi. Erişim tarihi: 5 Haziran 2015.
- Lubarda, Vlado A. (2001). Elastoplasticity Theory. CRC Press. ISBN 0-8493-1138-1. 9 Ocak 2014 tarihinde kaynağından arşivlendi. Erişim tarihi: 5 Haziran 2015.
- Lubliner, Jacob (2008). Plasticity Theory (Revised Edition) (PDF). Dover Publications. ISBN 0-486-46290-0. 31 Mart 2010 tarihinde kaynağından (PDF) arşivlendi. Erişim tarihi: 5 Haziran 2015.
- Malvern, Lawrence E. (1969). Introduction to the mechanics of a continuous medium. New Jersey: Prentice-Hall, Inc.
- Mase, George E. (1970). Continuum Mechanics. McGraw-Hill Professional. ISBN 0-07-040663-4. 14 Ağustos 2014 tarihinde kaynağından arşivlendi. Erişim tarihi: 5 Haziran 2015.
- Mase, G. Thomas; George E. Mase (1999). Continuum Mechanics for Engineers (Second Edition bas.). CRC Press. ISBN 0-8493-1855-6. 25 Mayıs 2013 tarihinde kaynağından arşivlendi. Erişim tarihi: 5 Haziran 2015.
- Maugin, G. A. (1999). The Thermomechanics of Nonlinear Irreversible Behaviors: An Introduction. Singapore: World Scientific.
- Nemat-Nasser, Sia (2006). Plasticity: A Treatise on Finite Deformation of Heterogeneous Inelastic Materials. Cambridge: Cambridge University Press. ISBN 0-521-83979-3. 9 Ocak 2014 tarihinde kaynağından arşivlendi. Erişim tarihi: 5 Haziran 2015.
- Ostoja-Starzewski, Martin (2008). Microstructural Randomness and Scaling in Mechanics of Materials. Boca Raton, FL: Chapman & Hall/CRC Press. ISBN 978-1-58488-417-0. 15 Mayıs 2014 tarihinde kaynağından arşivlendi. Erişim tarihi: 5 Haziran 2015.
- Rees, David (2006). Basic Engineering Plasticity - An Introduction with Engineering and Manufacturing Applications. Butterworth-Heinemann. ISBN 0-7506-8025-3. 1 Ocak 2014 tarihinde kaynağından arşivlendi. Erişim tarihi: 5 Haziran 2015.
- Wright, T. W. (2002). The Physics and Mathematics of Adiabatic Shear Bands. Cambridge, UK: Cambridge University Press.
Dış bağlantılar
- www.continuummechanics.org17 Mayıs 2014 tarihinde Wayback Machine sitesinde arşivlendi.
| Sürekli ortamlar mekaniği | Katı mekaniği (Elastikiyet teorisi veya maddelerin dayanımı olarak da bilinir). Katı mekaniği, sürekli katılar üzerine fizik çalışmasıdır. | Elastikiyet, Bir gerinme uygulandıktan sonra eski formuna dönen maddeler. | |
| Plastikiyet, Yeterli gerinme uygulandığında (şekil değişimi için) kalıcı deformasyona uğrayan maddeler. | Reoloji Viskoelastik (Viskoz ve elastiğin kombinasyonu), katı mekaniği ve akışkanlar mekaniği arasındaki net olmayan sınırdaki bazı maddeler. | ||
| Akışkanlar mekaniği (Akışkanlar statiği ve Akışkanlar dinamiğini içerir.), akışkanlar fiziği ile çalışır. Akışkanların önemli özelliği viskozitedir, bir hız alanına karşı akışkanın ürettiği güç olarak tanımlanabilir. | Newtonyen olmayan (Non-Newtonian) akışkanlar | ||
| Newtonyen (Newtonian) akışkanlar | |||